


سنسور فشار چیست: درواقع سنسورفشار در کنترل فرآیندهای صنعتی داده های فشار راتبدیل به یک سیگنال الکتریکی میکند تا تحلیل شوند که در این مقاله به یک روش نوین کالیبراسیون میپردازیم.
چکیده:
این مقاله با استفاده از مدل یک شبکه عصبی مصنوعی انتشار لوونبرگ مارکوارت بک (LMBP-ANN) یک روش جدید برای پیشبینی کالیبراسیون خودکار در یک سنسور فشار بیان میکند. الگوریتم خود کالیبراسیون بایسی بتواند به رفع عمده مشکلات در سنسور فشار مانند هیسترزیس ، تغییر در بهره و خطی نبودن با دقت بالا بپردازد. در کالیبراسیون سنتی ، روند کار این مدل سنسور کاری بسیار زمان بر است چرا که فرآیند شناسایی و تکرار آن بصورت دستی صورت میگیرد. همچنین روش محاسبات سنتی برای حل مسائلی که فرمول های ریاضی دشواری دارند و شامل متغییرهای فشار چندگانه هستند کافی نیست. بنابراین، این مقاله یک روش جدید خود کالیبراسیون برای سنسورهای فشار غیرخطی بر اساس مدل LMBP-ANN بیان میکند. روش پیشنهادی به بوسیله ی داده های جمع آوری شده از سنسور های فشار در زمان واقعی بدست آمده است.
معرفی:
سنسور های فشار بنا به توانایی آن ها در تسهیل جمع آوری داده ها (DAQ) و توسعه یک سیستم اندازه گیری حقیقی در بسیاری از کاربرد های رباتیک مدرن ، مثل دست های رباتی عناصر اساسسی هستند . روز به روز دست های رباتیک به مسئله مهم تر و پر رنگ تری در زندگی روزمره ما تبدیل میشوند چرا که با اعمالی چون گرفتن اشیاء ، انجام وظایف و کارها یا حتی برابری جستن با دست واقعی انسان ، محیط ما را در بر گرفته اند. بعضی از انواع دست های رباتیک بنا به اهداف متفاوتی مانند امور ماهرانه ، اندام مصنوعی، گرفتن اشیاء ، کاربرد های توانبخشی ، انتخاب و جایگذاری ایجاد شده اند.
اگرچه ، در زمینه های توانبخشی ، توسعه دستکش های پوشیدنی رباتیک بر اساس سنسورهای فشار برای یک سیستم اندازه گیری که شامل یک مدل متناسب با حداقل زمان کالیبراسیون و داده های انداه گیری بسیار دقیق است ، موجود است . همچنین سنسور های ورودی مختلف بایسی قابل شناسایی و بررسی باشد و در همین حال قادر به غلبه بر مشکلات سیگنال خروجی غیر خطی باشد. در واقع خطی سازی سیگنال خروجی سنسور ها و فرآیند کالیبراسیون جز موارد اصلی هستند که در تعریف ویژگی های سنسور فشار نقش ایفا میکنند.
درحال حاضر از شبکه های عصبی به عنوان خطی سازی استفاده میشود که در آن منحنی پاسخ تابع تبدیل سنسور را میتوان شناسایی و تقویت کننده ها را خطی سازی کرد. ANN ها مفید هستند چراکه شبکه های feedforward تقریب کننده های جهانی که قادر به یادگیری توابع پیوسته با هر درجه دقت دلخواه هستند. در بیشتر موارد ، مدل ANN توسط الگوریتم back-propagation (BP) (پس انتشار) تعلیم داده شد.
ANN ها ابزار قابل اطمینانی را ارائه می دهند که قادر است مشکلات پیچیده را مدلسازی و پیشبینی کند. این قابلیت را دارد که تعاملات پیچیده بین متغییر های مختلف را با قابلیت خود آموزی بالا (self-learning) ثبت کند. علاوه بر این ، شبکه های عصبی مصنوعی را میتوان برای انواع وظایف و مسائل مانند : طبقه بندی ، تفسیر ، تشخیص مدلسازی و کنترل بکار برد. آن ها برای مسائلی که حل کردن آن ها با مدلسازی ریاضی یا سایر روش های کلاسیک بسیار دشوار است مناسب تر اند.
روش ها:
این بخش رسیدگی به سیستم اندازه گیری از جمله تهویه و کالیبراسیئن سنسور فشار مورد استفاده را نشان میدهد. همچنین مدل شبکه عصبی مصنوعی را برای پیاده سازی کالیبراسیون خودکار سیستم اندازه گیری فشار بیان میکند.
معماری و پارامتر های شبکه عصبی مصنوعی:
از آنجا که هیچ روش بهینه قابل قبولی برای تعیین بهترین معماری یک شبکه عصبی مصنوعی وجود ندارد، یک رویکرد آزمون و خطا اتخاذ شد. تعداد نورونها، تعداد لایهها، توابع فعالسازی، الگوریتم آموزشی و الزامات محاسباتی از نکات اصلی توجه شده در طول طراحی هستند. این ویژگی ها با توجه به محدودیت کمترین خطای خروجی و ساده ترین ساختار ANN تعیین شدند.
بر این اساس، طراحی معماری شبکه با تعداد نورونهای پنهان کمتر آغاز شد و سپس تعداد نورونهای پنهان تنظیم شد. معماری پیشنهادی مدل ANN که بهترین تعمیم را ارائه میکرد، قرار گرفت و در شکل 1 نشان داده شده است. در واقع، چندین لایه از نورون ها با توابع انتقال غیرخطی به شبکه اجازه می دهد تا روابط غیرخطی و خطی بین بردارهای ورودی و خروجی را بیاموزد . پس شبکه پیشنهادی شامل دو ورودی (گره) است که پارامترهای اثرگذار بر خود کالیبراسیون سنسور فشار، همراه با 10 نورون در لایه پنهان و یک تابع فعالسازی لگاریتمی را بیان میکند. لایه خروجی نورونی تنها با تابع فعال سازی خطی است که الگوی فشار را به عنوان نشانه ای از خود کالیبراسیون نشان می دهد.
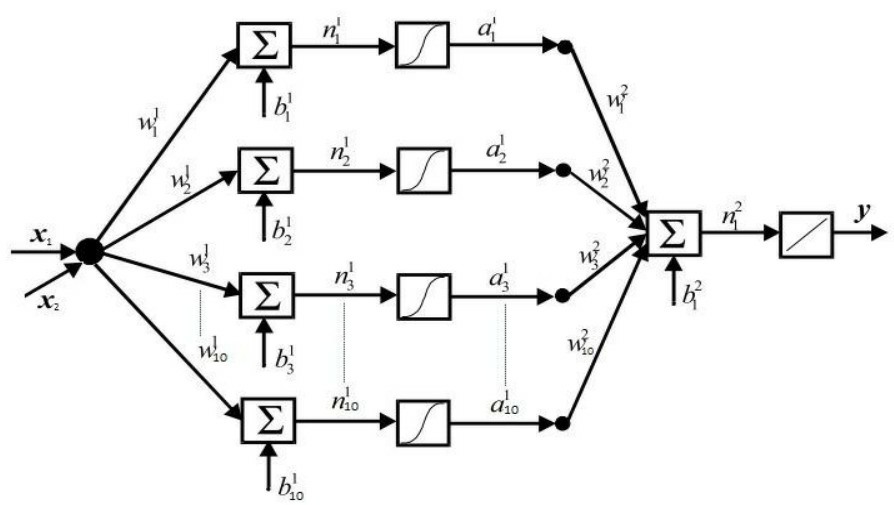
شکل 1: معماری شبکه های عصبی مصنوعی استفاده شده
خروجی ANN مورد استفاده به صورت زیر تعریف می شود:
Y=Purelin[Wi^2(Tansig(Wi +bi))+bi^2] , i=1 to 10
کالیبراسیون سنسور فشار:
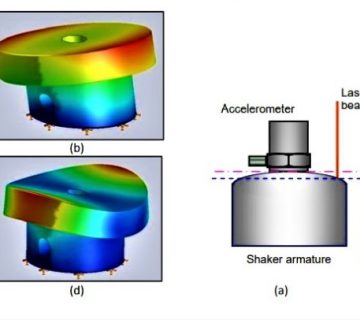
فرآیند کالیبراسیون حرکتی (پویا) که شامل کالیبراسیون اندازه گیری ها میشود در طول زمان دستخوش تغییر شده اند. تحلیلگر بافت CT3 برای اعمال نیروی مداوم بر روی سنسور فشار مورد استفاده قرار گرفت. با تغییر فشار درطول زمان زمان، نوع کالیبراسیون پیشنهادی کالیبراسیون دینامیک بود. بنابراین، کالیبراسیون پنج سنسور فشار به شکل حرکتی (پویا) اجرا شد.
اگرچهبرای استنباط منطقی برای کاربرد، مانند تجزیه و تحلیل مکانیسم گرفتن و گرفتن امن با استفاده از دستکش دستی روباتیک پوشیدنی، نیاز بود دادههای اندازهگیری دقیق را از سنسورهای فشار در اختیار داشته باشیم. از این رو، مدل سیگنال حسگر برای یادگیری رابطه اساسی بین خواندن سنسور (Vo) و نیروی اعمال شده (F) نیاز به تجزیه و تحلیل داشت.
همچنین ، از آنجایی که سنسورهای مختلف تحت شرایط یکسان مورد استفاده قرار گرفتند، اندازهگیریهای متفاوتی از ولتاژ خروجی نسبی شناسایی شد. برای مثال ، حداکثر ولتاژ های پیک خروجی برای سنسور 1 تا 5 در کل دوره کالیبراسیون تحت فشار یکسان به ترتیب 1.237357 ، 1.751546، 1.687251، 1.494452 و 1.883202 بود. تغییرات در خروجی ولتاژ و ولتاژ نهایی سنسور 5 ، به علت خزش مواد پیزومقاومت (piezoresistivity) در طول زمان، بالاترین میزان را داشتند.
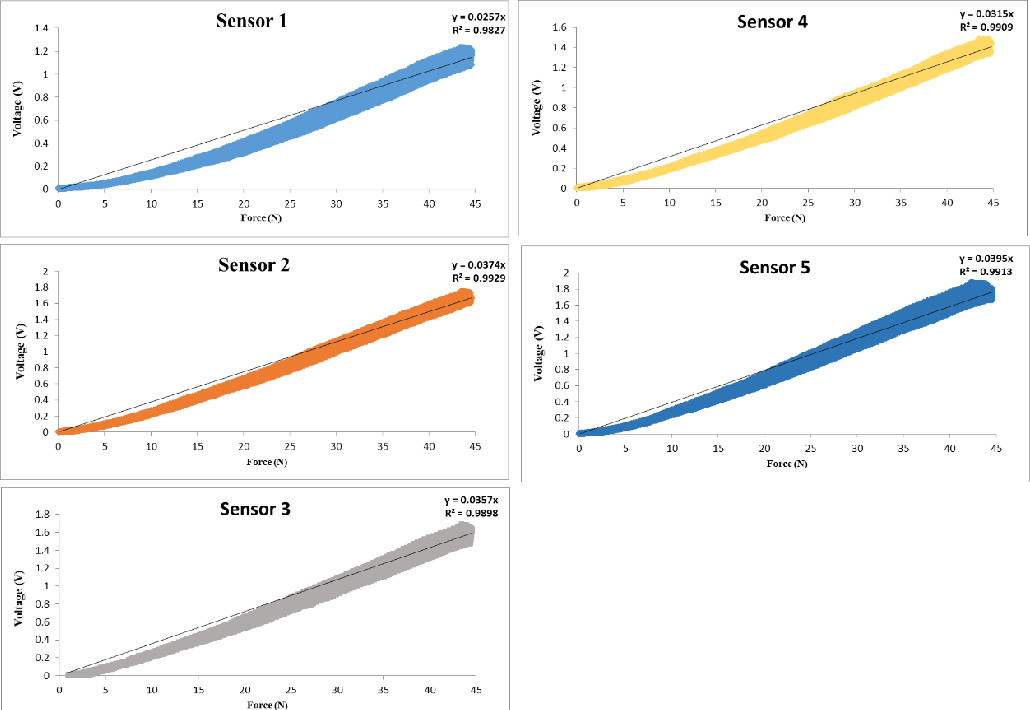
شکل 2: ولتاژ خروجی کالیبراسیون دینامیکی در برابر نیروی پنج سنسور فشار.
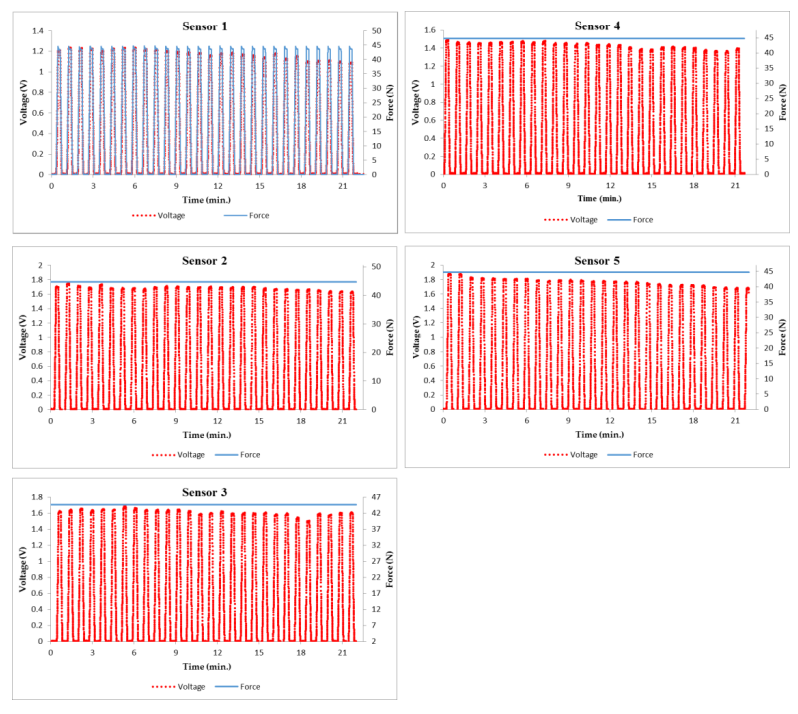
شکل 3: تغییر ولتاژ نسبی اندازه گیری شده در سنسور در طول 20 دقیقه در حالی که نیروی دینامیکی 44.13 نیوتن اعمال می شود (28 چرخه تکرار، زمان نگهداری 10 ثانیه، نرخ نمونه برداری 100 هرتز).
آزمون و سنجش:
برای الگوریتم آموزشی، تولید مجموعه داده ها اهمیت دارد. داده ها از سیستم اندازه گیری فشار با استفاده از پنج سنسور فشار و دستگاه تحلیل بافت CT3 جمع آوری و همچنین سنسور نیروی سلول بار که به عنوان مرجع برای داده های کالیبره شده استفاده شد. ANN آموزشی برای هر سنسور فشار با بیش از 132000 داده کالیبراسیون بدست آمده به مدت 20 دقیقه بارگذاری دینامیکی انجام شد. توپولوژی مدل پیشنهادی LMBP-ANN در شکل 4 نشان داده شده است. برای هر سنسور کالیبراسیون آزمایشی ، 132243 نمونه مجموعه داده در حین اعمال فشار دینامیکی توسط دستگاه تحلیل بافت CT3 به دست آمد.
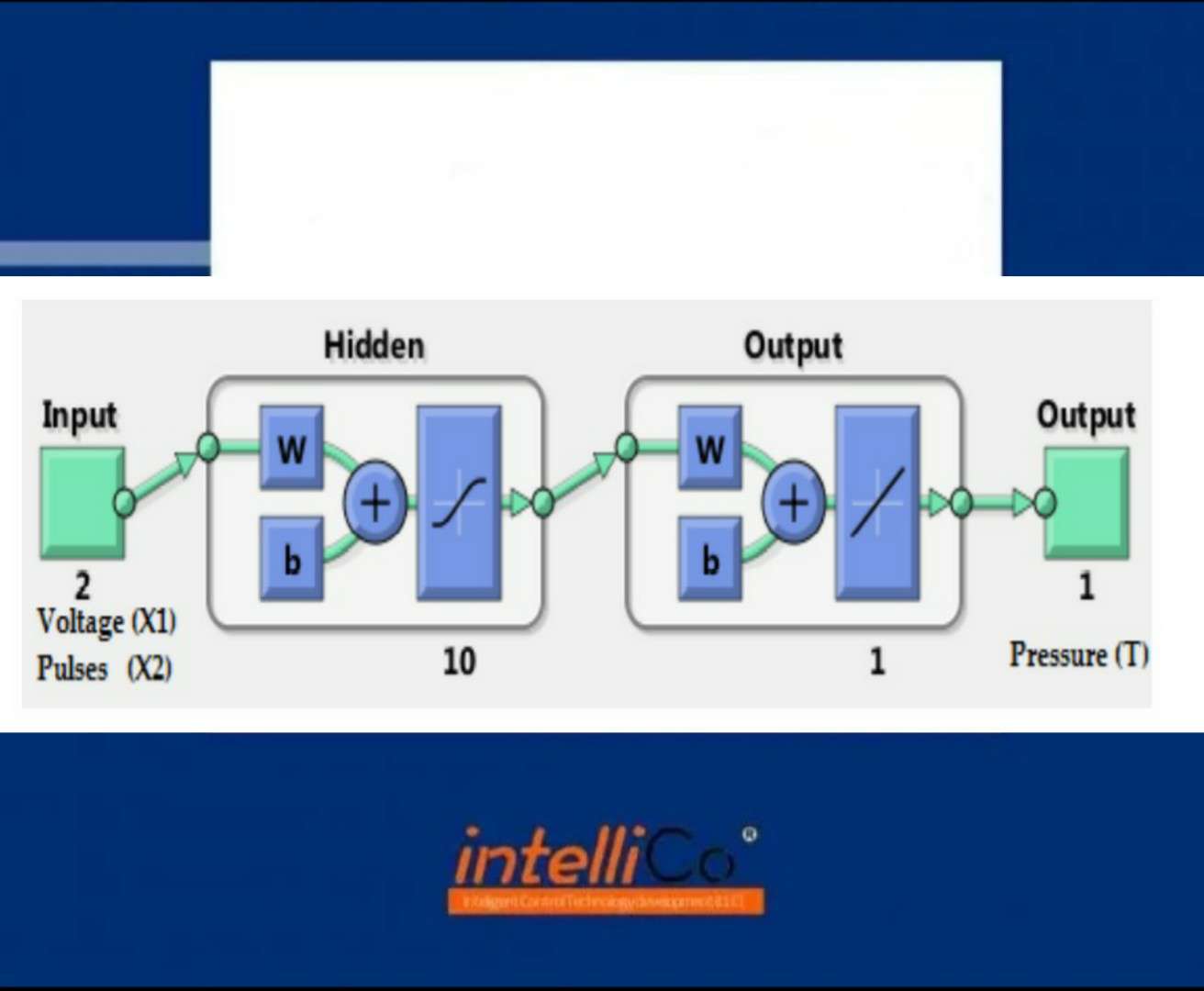
شکل 4: شبکه feedforward دو لایه با تابع انتقال هلالی (sigmoid) در لایه پنهان و تابع انتقال خطی در لایه خروجی.
از آنجایی که کاهش ولتاژ خروجی در طول زمان همراه با نوسان بود ، زمان به عنوان ورودی مدل ANN در نظر گرفته شد و به صورت دینامیکی شناسایی شد. بنابراین ، به جای استفاده از زمان ، تعداد سیکلها یا پالسها انتخاب شد زیرا میتواند بیانگر کاهش ولتاژ خروجی در طول فرآیند کالیبراسیون باشد.
عملکرد مدل LMBP-ANN :
عملکرد مدل LMBP-ANN عمدتاً به توانایی آن در پیشبینی دادههای خروجی تجربی با دقت معقول بستگی دارد. عملکرد مدل LMBP-ANN عمدتاً به توانایی آن در پیشبینی دادههای خروجی تجربی با دقت معقول بستگی دارد. همانطور که در شکل 5 مشخص است، خروجی مدل ANN قادر به پیش بینی دقیق خود کالیبراسیون فشار نسبت به داده های تجربی واقعی بود. برای نمونه، ضریب تعیین (R2) پیشبینی مدل در برابر دادههای تجربی برای مجموعه دادههای آموزش، اعتبارسنجی و آزمون به ترتیب 0.99975، 0.99975 و 0.99974 است. پس ، میتوان استدلال کرد که مدل ANN پیشنهادی، روابط بین دادههای ورودی و خروجی ارائه شده را با دقت قابل قبولی دریافت میکند، که نشاندهنده عملکرد عالی آن است. علاوه بر این، صرف نظر از نوسان دادههای فشار ورودی به شبکه آموزشدیده، توافق قابلتوجهی بین فشار خروجی شبکه و فشار هدف برای همه دادهها مشاهده شد.
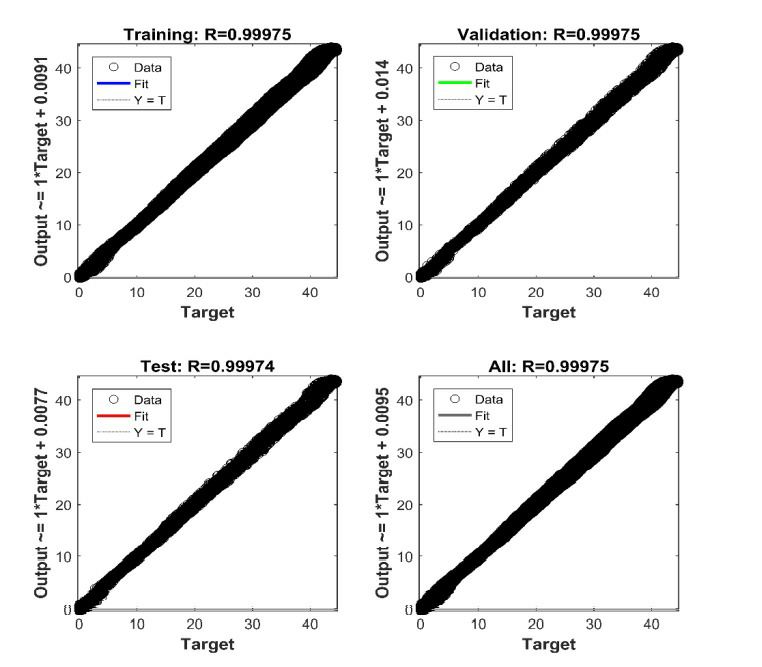
شکل 5: توافق بین فشار خروجی شبکه و فشار هدف برای آموزش، اعتبارسنجی، آزمایش و مجموعه داده کامل
اعتبار مدل پیشنهادی LMBP-ANN برای مجموعه داده کامل نیز از طریق میانگین مربعات خطا (MSE) و ضریب تعیین (R^2) بین پیشبینیهای مدل ارزیابی شد و نتایج تجربی مقدار MSE مطابق رابطه (2) 0.17325 و مقدار R^2 ، 0.99975 بود که نشان دهنده عملکرد مناسب بود. علاوه بر صحت عملکرد ذکر شده از شبکه، از روش هیستوگرام نیز برای به دست آوردن تأیید بیشتر عملکرد شبکه استفاده شد. شکل 6 توزیع داده یک متغیر پیوسته را نشان می دهد و نوارهای آبی، سبز و قرمز به ترتیب نشان دهنده داده های آموزش، اعتبار سنجی و آزمایش هستند.

شکل 6: ساختار یک هیستوگرام 20 بین با استفاده از الگوریتم آموزشی LMBP بر اساس ANN
نتیجه گیری:
در این مقاله یک روش نوین تخمین کالیبراسیون سنسور فشار برای درک مطمئن دست فلج بر اساس دستکشهای رباتیک پوشیدنی توسعه داده شده بیان شد. روش توسعه یافته مدل (LMBP-ANN) با استفاده از شبکه عصبی مصنوعی پیشنهادی Levenberg Marquardt Back Propagation اجرا شد.الگوریتم آموزشی LMBP به طور موثر در مدل ANN برای به حداقل رساندن MSE و مشخص کردن پارامترهای بهینه حاکم بر رابطه ورودی-خروجی مدل استفاده شد. داده های آزمایشی سیستم اندازهگیری فشار در زمان واقعی جمعآوری شد. با داده های فشار به دست آمده، مدل توسعه یافته LMBP-ANN آموزش داده شد.
نتایج تجربی بیان گر این بود که مدل توسعهیافته LMBP-ANN میتواند فشار اعمال شده را به دقت تخمین بزند و عملکرد آن نسبت به سایر روشهای سنتی با توجه به دقت تخمین در زمان واقعی مفید است.
مقدار MSE= 0.17325 و مقدار R2= 0.99975 بود که عملکرد مناسب را نشان دادند. کارهای آینده مربوط به اجرای این روش در میکروکنترلر با استفاده از دستکش رباتیک پوشیدنی بر اساس مکانیزم سنجش فشار است.
(Almassri, Wan Hasan et al. 2018)
Almassri, A. M., et al. (2018). “Self-calibration algorithm for a pressure sensor with a real-time approach based on an artificial neural network.” Sensors 18(8): 2561.
Almassri, A.M.; Wada, C.; Wan Hasan, W.Z.; Ahmad, S.A. Auto-Grasping Algorithm of Robot Gripper Based on Pressure Sensor Measurement. Pertanika J. Sci. Technol. 2017, 25, 113–121.
Suleiman, A.R.; Nehdi, M.L. Modeling Self-Healing of Concrete Using Hybrid Genetic Algorithm–Artificial Neural Network. Materials 2017, 10, 135. [CrossRef] [PubMed]
Rivas, J.R.; Lou, F.; Harrison, H.; Key, N. Measurement and Calibration of Centrifugal Compressor Pressure Scanning Instrumentation. 2015. Available online: https://docs.lib.purdue.edu/surf/2015/presentations/ 40/ (accessed on 2 August 2018).

{kind=link}
بدون دیدگاه