


سنسور های جابجایی: در این سنسورها روش اندازه گیری فاصله بر اساس ارسال و دریافت یک نوع سیگنال انجام می شود به این شکل که
سیگنالی با ویژگی های مشخص ارسال شده و سپس ویژگی های سیگنال بازگشتی مثل مدت زمان برگشت، تغییر در شکل سیگنال و … مورد بررسی قرار میگیرند.
1معرفی:
سنسور های اندازه گیری جابجایی نقش اساسی در تمام جنبه های اندازه شناسی ابعادی دارند. آنها را می توان برای اندازه گیری جابجایی مستقیم استفاده کرد، اما اغلب آنها بخشی از یک سیستم اندازه گیری هستند، مانند یک میکروسکوپ نیروی اتمی یا یک ماشین اندازه گیری مختصات (CMM). همچنین می توان از آنها به عنوان پروب در توپوگرافی سطح یا اندازه گیری گردی استفاده کرد. برای دستیابی به اندازه گیری قابل ردیابی که می تواند به متر مربوط شود، این سنسورها باید بر اساس استاندارد مرجعی کالیبره شوند که نسبت به سنسور مورد آزمایش بدون نویز و خطا بیشتر باشد. این بررسی به کالیبراسیون حسگرهایی با محدوده در محدوده زیر میلیمتری با عدم قطعیت در سطح نانومتر یا کمتر میپردازد. چندین اصل کالیبراسیون بررسی و مقایسه خواهد شد. روش کالیبراسیون می تواند شبه استاتیک و همچنین پویا باشد. کاوشگر همچنین میتواند اساساً در جهت سنجش خود ثابت باشد، اما برای اندازهگیری توپوگرافی به سمت این جهت جابجا شود. اصول پروب در بخش 2 تشریح خواهد شد. بخش 3 برخی از جنبه های مشترک کالیبراسیون سنسور را مستقل از اصل سنسور یا روش کالیبراسیون ارائه می دهد. بخش 4 اصول عمده کالیبراسیون موجود در ادبیات را مرور می کند: تداخل سنجی لیزری، کاربردهای مختلف حفره های Fabry-Pérot و تداخل سنجی اشعه ایکس. بخش 5 گسترش سیستم های کالیبراسیون پویا را بررسی می کند.
2 سنسورهایی که باید کالیبره شوند
سنسورهای اندازهشناسی بعدی که نیاز به کالیبراسیون دارند، اساساً حسگرهای خازنی و القایی هستند که در کاربردهای مختلف مورد استفاده قرار میگیرند. مروری بر انواع و اصول را می توان به عنوان مثال در Doebelin و Weckenmann و همراه با برخی استراتژی های کالیبراسیون توسط لیچ یافت. مروری کوتاه بر انواع اصلی در اینجا آورده شده است:
- سنسورهای القایی که ترانسفورماتورهای دیفرانسیل متغیر خطی (LVDT) نیز نامیده می شوند. سنسورهای القایی اساساً بدون تماس هستند، اگرچه تجسم رایج، کاوشگری است که میتواند مستقیماً به داخل/خارج از محور خود حرکت کند، در حالی که موقعیت توسط یک مدار الکترونیکی داخلی تعیین میشود. یک ویژگی کلی این است که وضوح می تواند بسیار بالا باشد، تا سطح زیر نانومتر، اما این به معنی تقویت بالا است که محدوده را محدود می کند. برای وضوح زیر نانومتر، محدوده ممکن است به ± 10 میکرومتر محدود شود. سنسورهای القایی هم به صورت مستقل و هم در تسترهای زبری و گردی استفاده می شوند.
- سنسورهای خازنی. حسگرهای خازنی از این واقعیت فیزیکی استفاده می کنند که ظرفیت بین دو الکترود به هندسه و فاصله بین این الکترودها بستگی دارد. مانند سنسورهای القایی، حساسیت می تواند بسیار زیاد باشد، اما برای حساسیت بسیار بالا محدوده محدود است. برخی از انواع به دو الکترود نیاز دارند، برخی دیگر هنگام نزدیک شدن به یک محیط رسانا از اثر القایی استفاده می کنند تا اصولاً بدون تماس باشند.
- سنسور کانفوکال. این سنسور از یک لنز برای فوکوس کردن پرتو نور بر روی سطح استفاده میکند و پس از اینکه نور از حالت فوکوس خارج شد، سیگنال خطای فوکوس میدهد. حدوده و وضوح به پیکربندی بستگی دارد، اما وضوح nm را می توان به دست آورد. رایج ترین کاربرد به عنوان عنصر تشخیص در پخش کننده CD یا DVD است.
- پروب رنگی کانفوکال. این سنسور شبیه به یک سنسور کانفوکال عمل می کند، اما لنز به طور عمدی رنگی است و طیف نور بازتاب شده تشخیص داده می شود. از این طیف موقعیت سطح بازتابنده محاسبه می شود. این مزیت را دارد که به طور مستقیم یک موقعیت به دست می آید بسته به اینکه چه رنگی در فوکوس است. بسته به پیکربندی، وضوح می تواند در محدوده nm باشد.
- رمزگذار خطی. یک رمزگذار خطی از یک مقیاس خط تشکیل شده است که به صورت نوری الکترونیکی خوانده می شود. ویژگی های مهم عبارتند از گام و کیفیت درون یابی سیستم خواندن. برای خواندن با وضوح بالا از خواص پراش شبکه های تناوبی استفاده می شود. با توجه به این خواص پراش، کوچکترین گام مفید حدود 0.4 میکرومتر است. خطاهای درون یابی مجدداً به صورت دوره ای با هر جابجایی در مقدار صحیحی از فواصل زمین ظاهر می شوند. به دلیل مقیاس، خطی بودن می تواند در فواصل طولانی، تا متر، بسیار خوب باشد. به طور کلی ویژگی های کالیبراسیون شامل انحرافات گام است که ممکن است در مقیاس طولانی تر ظاهر شود، با خطاهای درون یابی بین خطوط که هر طول گام را تکرار می کند. یک نمای کلی از فناوری ها و تنظیمات توسط Cosijns ارائه شده است. هنگامی که در پروب هایی که محدوده های کوچکی را پوشش می دهند، این سنسورها ممکن است شبیه یک سنسور القایی به نظر برسند، اگرچه اصل کار اساساً متفاوت است.
- تداخل سنج لیزری. ابزار اصلی که برای دستیابی به دقت، خطی بودن و قابلیت ردیابی بالا استفاده می شود تداخل سنج لیزری است که از اوایل دهه 1980 در بازار وجود دارد. مروری کلی از کاربردهای آن در جای دیگر داده شده است. این ابزار می تواند برای جابجایی های کوچک تحت کالیبراسیون قرار گیرد، اما می تواند به خوبی به عنوان مرجع کالیبراسیون سایر سنسورها عمل کند. این به این دلیل است که تداخل سنج لیزری را می توان در یک یا چند مرحله به یک استاندارد اولیه ارجاع داد تا ردیابی به متر تضمین شود. برای جابجاییهای کوچک، تأثیر پایداری فرکانس ناپدید میشود و عوامل باقیمانده که عدم قطعیت را محدود میکنند، نویز، غیرخطی بودن دورهای و عوامل محیطی، بهویژه دماها هستند که ممکن است بر تنظیم کالیبراسیون تأثیر بگذارند.
3 جنبه های رایج سیستم های کالیبراسیون سنسور جابجایی
3.1 تنظیمات اولیه کالیبراسیون
دو تنظیم اساسی کالیبراسیون ارائه شده است و در شکل 1 نشان داده شده است. سنسوری که باید کالیبره شود، یعنی حسگر مورد آزمایش، بر روی یک پلت فرم کالیبراسیون نصب شده است. این پلت فرم را می توان با استفاده از مکانیزم رانندگی در محدوده کالیبراسیون مورد نظر حرکت داد. برای جابجایی های کوچک، این معمولاً یک مبدل پیزو یا یک سیم پیچ صوتی است. پس از جابجایی این سنسور، جابجایی تشخیص داده شده آن ثبت می شود. در همان زمان جابجایی سنسور مرجع خوانده می شود. معمولاً این سنسور مرجع در یک طرف سکو قرار دارد در حالی که سنسور تحت آزمایش از طرف دیگر اندازه گیری می کند (شکل 1a را ببینید)، با این حال گاهی اوقات هم سنسور مرجع و هم سنسور تحت آزمایش سطح یکسانی را از یک طرف اندازه می گیرند (شکل 1b را ببینید. ). سنسور جابجایی و مرجع را می توان به صورت افقی نیز جهت گیری کرد. باید دقت کرد که حرکت مستقیم و موازی پلت فرم کالیبراسیون برای جلوگیری از خطاهای Abbe و کسینوس مشخص شود. هنگامی که پروب در حین کالیبره شدن روی سطح حرکت می کند، مسطح بودن سطح مرتبط است. در این حالت نیز حرکت باید کاملاً نرمال به سطح باشد تا از مشکلات تراز و خطاهای کسینوس جلوگیری شود.
((برای وضوح بهتر تصاویر بر روی آنها کلیک کنید))
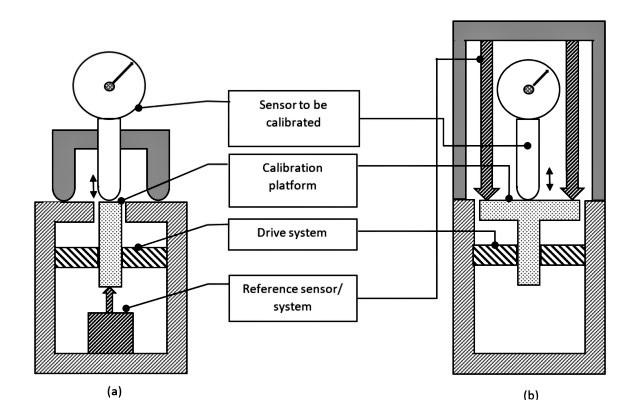
شکل1: تنظیمات کالیبراسیون رایج برای کالیبراسیون سنسور جابجایی. در سمت چپ (a) حسگر مرجع جابجایی پلت فرم کالیبراسیون را از سمت دیگر به عنوان سنسوری که باید کالیبره شود تشخیص می دهد. در سمت راست (ب) حسگر مرجع و سنسوری که باید کالیبره شود، جابجایی پلت فرم کالیبراسیون را از یک طرف تشخیص می دهد.
سنسور مورد آزمایش می تواند هر یک از حسگرهایی باشد که در بخش 2 مورد بحث قرار گرفت و همچنین انواع دیگر حسگرها.
3.2 ثبت و نمایش نتایج کالیبراسیون
نتایج کالیبراسیون را می توان در جدول یا نموداری ثبت کرد که جابجایی z را همانطور که توسط حسگر اندازه گیری می شود برای کالیبره شدن در برابر جابجایی z همانطور که توسط سنسور مرجع اندازه گیری می شود، نمایش می دهد. در برخی زمینهها، تمایز بین ضریب تقویت αz (که ضریب کالیبراسیون نیز نامیده میشود) و انحراف خطی lz متداول است، که عبارت است از انحراف سیگنال سنسور از رابطه خطی بین حسگر مورد کالیبره و حسگر مرجع. شکل 2 نموداری را که معمولاً نمایش داده می شود نشان می دهد.
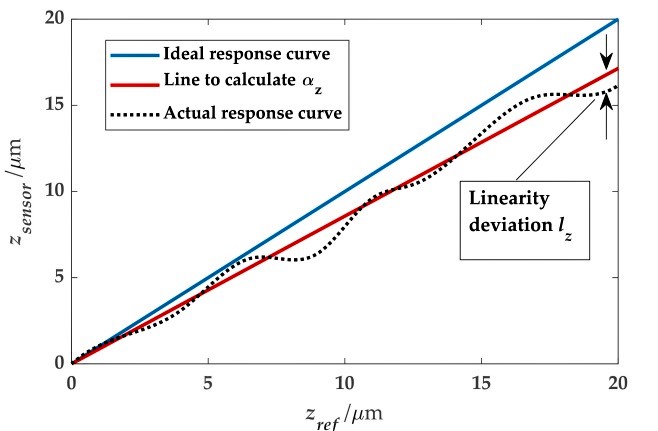
شکل2: مثالی از منحنی پاسخ و مشتق ضریب تقویت و انحراف خطی.
برای سنسور هایی با انحراف کوچک از خطی بودن، نمایش انحرافات به عنوان تابعی از مقدار مرجع می تواند مفیدتر باشد، زیرا در آن حالت منحنی کالیبراسیون اساساً یک خط مستقیم را بدون انحرافات قابل مشاهده نشان می دهد. اگر اندازه گیری ها در یک محدوده جابجایی بزرگ با گام های کوچکتر و بزرگتر انجام شود، ممکن است استفاده از مقیاس های لگاریتمی برای هر یک از محورها مفید باشد. برای گزارشهای رسمیتر مانند گواهیهای کالیبراسیون، جدول مقادیر و انحرافات همراه با تخمین عدم قطعیت بسیار مفید است.
4 اصول کالیبراسیون سنسور جابجایی
اصول سنسور هایی که میتوانند برای یک سیستم کالیبراسیون استفاده شوند، اساساً در بخش 2 فهرست شدهاند، اما برای یک حسگر مرجع، وضوح، امکانات کالیبراسیون ذاتی، و در صورت امکان، قابلیت ردیابی مستقیم به یک استاندارد اولیه، ویژگیهای اساسی هستند. مروری کوتاه توسط لیچ [3] ارائه شد. این بخش یک نمای کلی از اصول و سیستم های مورد استفاده در عمل ارائه می دهد.
4.1 سیستم های مبتنی بر تداخل سنج لیزری جابجایی
تداخلسنجهای لیزری که اساساً تداخلسنجهایی از نوع Michelson هستند، به دلیل دقت و تطبیقپذیری بالا، همراه با امکان اندازهگیریهای دینامیکی شناخته میشوند. شکل 3 یک سیستم کالیبراسیون مبتنی بر یک سیستم تداخل سنج لیزری را نشان می دهد که به منظور کالیبره کردن یک پروب سه بعدی در چندین جهت استفاده شده است. طراحی تداخل سنج دو مسیره با هدف به حداقل رساندن اثرات رانش در تنظیم است.
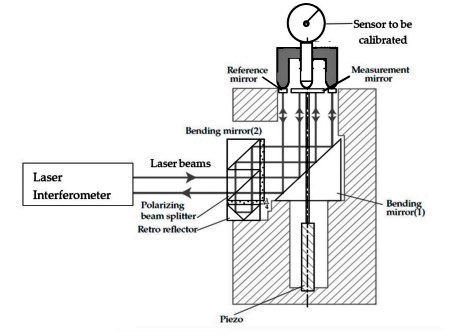
شکل 3: اصل سیستم کالیبراسیون حسگر بر اساس تداخل سنج لیزری آینه صفحه.
برای کالیبراسیون دینامیکی، رانش ممکن است کمتر از انحراف خطی بودن و/یا وابستگی به فرکانس اهمیت داشته باشد زیرا فقط بخش متغیر (سینوسی) سیگنال در نظر گرفته میشود. بنابراین تنظیمات کمتر پیچیدهتر در مقایسه با تنظیم نشاندادهشده در شکل 3 طراحی شدهاند. شکل 4 شماتیک چنین تنظیماتی را نشان می دهد. شکل 4b تنظیمی را نشان می دهد که در آن یک آینه تخت به طور همزمان توسط یک سنسور LVDT از یک ابزار اندازه گیری زبری یا گردی اندازه گیری می شود، در حالی که به عنوان یک سنسور مرجع از تداخل سنج لیزری در پیکربندی آینه تخت استفاده می شود که خطاهای Abbe-Error را کاهش می دهد. زمانی که آینه حرکت موازی نداشته باشد موضوعیت پیدا می کند.

شکل4: تنظیم کالیبراسیون دینامیکی بر اساس تداخل سنج لیزری به عنوان سنسور مرجع. آینه توسط (a) مبدل پیزو حرکت داده می شود و به طور همزمان توسط یک پروب و تداخل سنج لیزری اندازه گیری می شود. (b) همان اصل (a). ا این حال حرکت آینه از همان سمت اندازه گیری می شود. (c) تصویری از تنظیم همانطور که در (b) ترسیم شده است.
نقطه ضعف تداخل سنج های لیزری غیر خطی بودن باقی مانده آنهاست که هر نیم طول موج جابجایی را تکرار می کند. اینها معمولاً در ناحیه زیر نانومتری هستند، اما برای سیستمهای تراز زیر بهینه میتوانند چندین نانومتر باشند. این امر باعث میشود که تنظیمهای کالیبراسیون مبتنی بر سیستمهای تداخلسنج لیزری برای کالیبراسیون سیستمهای تداخلسنج لیزری که نوع مشابهی از انحرافات خطی را نشان میدهند، کمتر مناسب باشند. با این حال، ویژگیهای سایر انواع پروب، در جایی که دلیلی برای این فرض وجود ندارد که انحرافات دورهای با همان تناوب تداخلسنج لیزری مرجع را نشان میدهند، را میتوان با تحلیل فوریه نتیجه کالیبراسیون از غیرخطی بودن تداخلسنج لیزری متمایز کرد. به عنوان مثال، شکل 5 ویژگی های کالیبراسیون یک پروب خازنی را نشان می دهد که توسط یک سیستم تداخل سنج لیزری کالیبره شده است. انحراف دورهای با طول موج 0.15 میکرومتر (≈λ/8) و دامنه حدود 0.5 نانومتر که از تداخلسنج لیزری مرجع منشأ میگیرد، به وضوح از انحراف برد بلندتر خود پروب قابل تشخیص است.
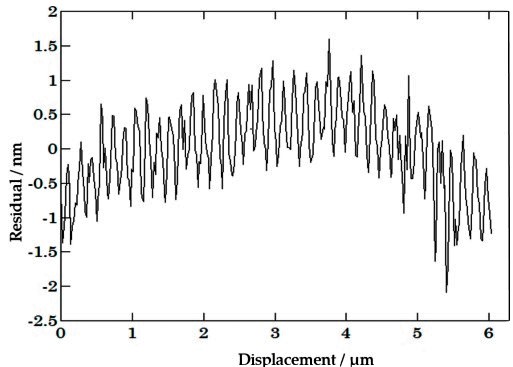
شکل5: نتیجه کالیبراسیون یک کاوشگر القایی (Mahr Millitron)، با استفاده از تنظیم کالیبراسیون همانطور که در شکل 3 نشان داده شده است، به عنوان انحراف از خطی بودن نمایش داده شده است (شکل 2 را ببینید).
سیستم های کالیبراسیون سنسور مبتنی بر سیستم های تداخل سنج لیزری توسط هرمان، جینگ، ژنگ، ژانگ، جی و لی بیشتر توضیح داده شده است. همه اینها بر اساس اصول مورد بحث در این بخش است. برهمکنش غیرخطی تداخل سنج لیزری دوره ای با پروب تحت کالیبراسیون توسط Köning و Sacconi بیشتر مورد مطالعه قرار گرفت. همچنین تداخلسنجهای لیزری اختصاصی طراحی شدهاند که غیرخطیهای غیرخطی را به سختی یا اصلاً نشان نمیدهند یا سیستمهایی برای جبران این موارد طراحی شدهاند. در آن صورت، اینها ممکن است برای ویژگی های نویز با سیستم های مبتنی بر تداخل سنج های Fabry-Pérot همانطور که در بخش بعدی بحث شد رقابت کنند.
4.2 سیستم های مبتنی بر تداخل سنج Fabry-Pérot
تفاوت عمده سنسور تداخل سنج Fabry-Pérot با سنسور تداخل سنج Michelson یا Fizeau این است که پیک های تداخل بسیار تیز در فواصل نیم طول موج ظاهر می شوند. ین ویژگی نسبت به تداخل سنجهای نوع Michelson دارای نقطه ضعفی است (به بخش 4.1 مراجعه کنید) که هیچ کالیبراسیون مفیدی در بین این پیکهای تداخل امکانپذیر نیست. از سوی دیگر این امکان تثبیت لیزرهای قابل تنظیم روی چنین حفره ای را فراهم می کند. جایی که یک جابجایی کوچک از یک آینه حفره باعث تغییر عمده در فرکانس لیزری می شود که روی حفره او تثبیت می شود. در وهله اول، یک استاندارد طول اولیه، یک لیزر تثبیت شده با ید، بر اساس یک حفره Fabry-Pérot است، جایی که فرکانس لیزر پس از تثبیت در یک شیب جذب ید، تعیین می شود. این بدان معنی است که یک تثبیت در همین شیب دقیقاً در هر λ/2 ظاهر می شود، جایی که λ طول موج، جابجایی یکی از آینه های حفره است. در وهله دوم، تداخل سنج Fabry-Pérot را می توان مستقیماً به عنوان حفره لیزری مورد استفاده قرار داد، جایی که فرکانس لیزر مستقیماً با طول حفره مرتبط است و می تواند با یک اندازه گیری ضربان در برابر استاندارد اولیه تعیین شود. در وهله سوم یک حفره Fabry-Pérot می تواند به عنوان یک حفره خارجی عمل کند که لیزر دیگری را می توان روی آن تثبیت کرد. جایی که فرکانس این لیزر در برابر لیزر مرجع کالیبره می شود. به عنوان مثال، یک استاندارد طول اولیه. این احتمالات در بخش های 4.2.1-4.2.4 توضیح داده شده است.
4.2.1 تغییر طول حفره استاندارد طول اولیه به عنوان یک دستگاه کالیبراسیون جابجایی
استفاده از لیزر تثبیت شده با ید برای سنسور به عنوان یک دستگاه کالیبراسیون جابجایی برای اولین بار توسط Ottmann و Sommer مورد بررسی قرار گرفت. آنها یک آینه حفره یک لیزر تثبیت شده با ید را با استفاده از یک میکرومتر جابجا کردند و موقعیت میکرومتری را گرفتند که در آن پیک جذب ید به عنوان موقعیت کالیبراسیون میکرومتر مشاهده شد. در جایی که رزولوشن میکرومتر در بهترین حالت کسری از میکرومتر است، و جابجایی آینه لیزری مؤثر دارای وضوح زیر نانومتر است، این نسبت برای کاربرد زیادهروی بود، اما اصل جدید بود. توضیح بیشتر بر اساس این اصل توسط برند و هرمان انجام شد. جابجایی های کوچک یک آینه لیزر باعث تغییر فرکانس لیزر می شود. با ثبت تلاقی های صفر سیگنال 3f اجزای ساختار فوق ریز ید، جابجایی را می توان بدست آورد. از آنجایی که تفاوت فرکانس انتقال ید R(127) 11-5 در یک عدم قطعیت استاندارد 5 کیلوهرتز شناخته شده است، موقعیت آینه را می توان با عدم قطعیت 4 بعد از ظهر بدست آورد. در محدوده تکرار λ/2، مراحل اسمی 10، 18، 84 و 165 نانومتر را میتوان در محدوده کل کالیبراسیون 13 میکرومتر انجام داد. شماتیکی از این تنظیم در شکل 6 نشان داده شده است. مزیت اصلی این روش حلقه ردیابی بسیار مستقیم است: به عنوان یک استاندارد اولیه که مستقیماً استفاده می شود ردیابی مستقیماً تضمین می شود. علیرغم این مزیت، این روش به دلیل تقاضای زیاد برای حرکت مستقیم و موازی آینه لیزر، نقاط کالیبراسیون ناپیوسته و گرمای تولید شده توسط لیزر، فراگیر نشده است. سنسور
شکل6: طرحی از لیزر تثبیت شده با ید هنگامی که به عنوان یک دستگاه کالیبراسیون جابجایی استفاده می شود.
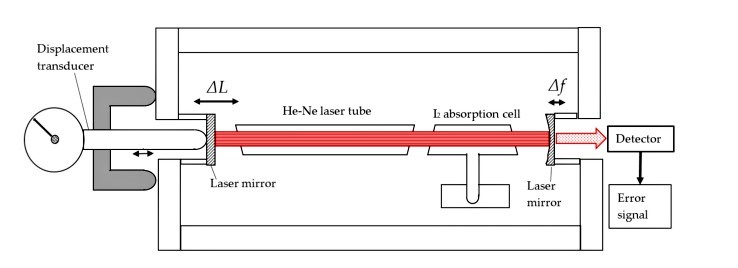
4.2.2 تغییر طول حفره لیزر He-Ne: لیزر اندازه گیری
یک نقطه ضعف عمده لیزر اندازهگیری در این سنسور ها مبتنی بر سلول جذب، ویژگی ناپیوسته آن است: طول حفره باید به دقت روی یک خط جذب مولکولی برای هر نقطه کالیبراسیون تنظیم شود. این نقطه ضعف توسط لیزر اندازه گیری مبتنی بر لیزر He-Ne که یک آینه به عنوان پلت فرم کالیبراسیون سنسور استفاده می شود، برطرف شده است. حفره باید به اندازه کافی بلند باشد تا He-Ne بتواند نور لیزر را ساطع کند، از سوی دیگر باید به اندازه کافی کوتاه باشد تا لیزر در حالت تک کار کند. این طول حفره را به محدوده 100-150 میلی متر محدود می کند. محدوده کاری حدود 1500 مگاهرتز کالیبراسیون فرکانس لیزر را با اندازه گیری ضربان با لیزر تثبیت شده با ید امکان پذیر می کند. شکل 7 سیستم را همانطور که توسط Wetzels و Schellekens تحقق یافت نشان می دهد. شکل 7a جزئیات طراحی لیزر اندازه گیری را نشان می دهد. شکل 7b محل مورد استفاده برای کالیبراسیون سنسور را نشان می دهد. جابجایی ΔL به عنوان یک تغییر فرکانس Δf اندازه گیری می شود.
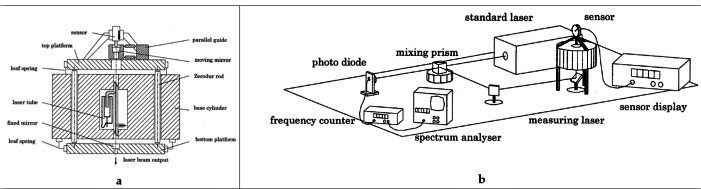
شکل7: مقطع شماتیک یک لیزر اندازه گیری He-Ne (a) و نمای کلی از تنظیم کالیبراسیون (b).
در مقایسه با سیستم توضیح داده شده در بخش 4.2.1، این تنظیم دارای مزیت اندازه گیری پیوسته و آنی است: برای تنظیم فاصله برای فعال کردن کالیبراسیون سنسور، به هیچ حلقه کنترلی نیاز نیست. اندازه گیری همانطور که توسط فرکانس شمار نشان داده می شود می تواند مستقیماً با استفاده از (1) به جابجایی منتقل شود. شکل 7a همچنین نشان می دهد که مقدار زیادی جرم حرارتی در تنظیم گنجانده شده است تا اثر گرمایی ایجاد شده توسط لوله تخلیه He-Ne کاهش یابد. با این حال، عدم قطعیت به دلیل تغییر گرادیان دما در سیستم همچنان زیاد بود. این عدم قطعیت را با وجود وضوح 0.012 نانومتر به حدود 25 نانومتر محدود کرد. سیستم مشابهی توسط Çip [40] توسعه داده شد که از آن برای تعیین غیرخطی بودن سیستم های تداخل سنج لیزری در یک پیکربندی نوری مانند شکل 3 استفاده کرد.
4.2.3 استفاده از یک حفره خارجی و یک Slave-Laser: The Metrological Fabry-Pérot cavity
لوله لیزر Ne-Ne به عنوان منبع گرما را می توان از حفره خارج کرد و فرکانس لیزر لیزر He-Ne دیگر را می توان روی همین حفره تثبیت کرد. ین مشکل دما/گرمایش را به قیمت لیزر دیگری و یک سیستم بازخورد برای تثبیت لیزر خارجی روی حفره از بین میبرد. برای استفاده از لیزر He-Ne در محدوده فرکانس 1500 مگاهرتز، این حفره هنوز هم باید نسبتاً طولانی باشد، معمولاً 140 میلی متر. برای به حداقل رساندن اثرات دما، طول حفره با استفاده از میله های zerodur تثبیت می شود و اثر ضریب شکست هوا با قرار دادن یک لوله خلاء در حفره کاهش می یابد. شکل 8 شماتیکی از چنین تنظیمی را نشان می دهد.

شکل8: بررسی اجمالی تنظیم تداخل سنج فابری-پرو مترولوژیکی.
فرکانس لیزر برده باید به منظور یافتن حداکثر شدت مناسب مدوله شود. این مجموعه برای کالیبره کردن سنسورهای جابجایی مختلف و همچنین برای تعیین انحرافات دوره ای سیستم های تداخل سنج لیزری مورد استفاده قرار گرفت. Riis از یک تنظیم مشابه برای کالیبره کردن ویژگی های پیزو عناصر استفاده کرد. در این تنظیم، بین محدوده ای که لیزر He-Ne می تواند در آن کار کند (حدود 1000 مگاهرتز)، محدوده تشخیص فرکانس دیود بهمن و شمارنده فرکانس (حدود 1000 مگاهرتز) و طیف آزاد وجود دارد. محدوده (FSR) حفره Fabry-Pérot، یعنی محدوده فرکانس تشدید برای جابجایی λ/2 از آینه متحرک. به طور کلی محدوده طیفی آزاد (FSR) به صورت زیر ارائه می شود:
FSR=C / 2nL’
که در آن c سرعت نور، n ضریب شکست هوا و L طول حفره است. محدوده فرکانس لیزر برده، محدوده فرکانس آشکارساز و همچنین طول حفره Fabry-Pérot محدوده ای را تعیین می کند که آینه متحرک حفره Fabry-Pérot می تواند قبل از ظاهر شدن یک ناپیوستگی در آن جابجا شود. گسترش دامنه فرکانس، به عنوان مثال، با استفاده از یک لیزر دیود با محدوده تنظیم گسترده تر به عنوان لیزر برده، همراه با استفاده از یک فتودیود با برد وسیع تر، امکان استفاده از محدوده اندازه گیری پیوسته بزرگتر و همچنین حفره Fabry-Pérot کوتاهتر را فراهم می کند. بر این اساس، هاوارد، استون و فو سیستمی مبتنی بر حفره 50 میلی متری فابری پرو و یک سیستم شمارنده فرکانس پهنای باند 20 گیگاهرتز توسعه دادند که محدوده اندازه گیری پیوسته 2.1 میکرومتر را به دست آورد. این محدوده تشخیص فرکانس توسط Bitou به پهنای باند 65 گیگاهرتز افزایش یافت. اندازهگیریهای فرکانس بالا مورد نیاز بیشتر با استفاده از یک شانه فرکانس نوری فعال میشوند، به عنوان مثال، در که در آن پهنای باند 140 گیگاهرتز با استفاده از یک حفره Fabry-Pérot 75 میلیمتری به دست آمد. در این کار، حفره دوم با طول مشابه، بدون عناصر متحرک، برای نظارت و جبران تغییرات در ضریب شکست هوا استفاده شد. همانطور که قبلا توسط شیبلی توسعه داده شد. به طور مشابه،. Çip و همکاران از یک طیف شانه فمتوثانیه برای به دست آوردن اندازه گیری فرکانس پهنای باند بالا با استفاده از یک حفره 65 میلی متری Fabry-Pérot استفاده کردند. عدم قطعیت به دست آمده 22 بعد از ظهر در جابجایی 650 نانومتر بود. روشی برای کاهش طول حفره توسط Joo پیشنهاد شد.
4.2.4 استفاده از حفره Fabry-Pérot Range Sub-Mm
هنگام کاهش طول یک حفره Fabry-Pérot، تأثیر اثرات دما و ضریب شکست هوا به طور متناسب کاهش می یابد. با این حال، هنگامی که طول حفره کمتر از 10 میلی متر می شود، طرح رایج با آینه های محدب ثابت نمی ماند و باید از آینه های صاف استفاده شود. این الزامات اضافی را برای یک حرکت موازی قرار می دهد. محدوده طیفی آزاد بسیار بزرگ می شود، که به این معنی است که لیزرهای با محدوده تنظیم محدود نمی توانند در طول حفره دلخواه تثبیت شوند. با این حال، اگر کالیبراسیون در فواصل λ/2 کافی باشد، ممکن است یک کالیبراسیون دقیق به دست آید. نویسنده چنین سیستمی را به عنوان یک گزینه کالیبراسیون برای یک ژنراتور جابجایی بر اساس مبدل پیزو دیجیتال توسعه داده است. این مبدل (Queensgate DPT-C-S) دارای یک بازخورد داخلی به یک حسگر خازنی است و وضوح زیر نانومتری را در محدوده جابجایی 15 میکرومتر به دست می آورد. شکل 9 شماتیکی از تنظیم را نشان می دهد. حفره Fabry-Pérot حدود 80 میکرومتر طول دارد. کالیبراسیون تنظیم با روشن کردن حفره Fabry-Pérot از بالا توسط لیزر انجام می شود. ردیاب نور تشخیص می دهد که آیا به اوج انتقال رسیده است یا خیر. این پیک با استفاده از تقویتکننده قفل تشخیص داده میشود، در حالی که به حفره یک ارتعاش دورهای کوچک (دامنه 4 نانومتر) داده میشود یا با دادن یک لیزر دیود قابل تنظیم مدولاسیون فرکانس 20 گیگاهرتز. منحنی کالیبراسیون را می توان با تکرارپذیری 0.1 نانومتر به دست آورد، جایی که پسماند سیستم حدود 1 نانومتر منبع عدم قطعیت اصلی باقی مانده بود. پس از برداشتن آینه بالایی و مکانیزم شیب، از این سیستم برای کالیبره کردن سنسورهای جابجایی استفاده شد.

شکل9: طرحی از یک سیستم کالیبراسیون مبتنی بر مبدل پیزو دیجیتال، کالیبره شده توسط تداخل سنج Fabry-Pérot.
4.3 سیستم های مبتنی بر تداخل سنجی اشعه ایکس
دقیق ترین و در عین حال پیچیده ترین روش برای به دست آوردن جابجایی های کوچک با وضوح بالا، تداخل سنج اشعه ایکس است. با طراحی آن، فاصله حاشیه در تداخل سنج اشعه ایکس با فاصله صفحات پراش در کریستال تعیین می شود. از آنجایی که پارامتر شبکه اتمی سیلیکون (0.192 نانومتر برای صفحات (220)) به خوبی در ادبیات تثبیت شده است، می توان آن را به عنوان یک استاندارد طول قابل ردیابی در نظر گرفت، تداخل سنجی اشعه ایکس اندازه گیری جابجایی قابل ردیابی را با وضوح 0.2 نانومتر امکان پذیر می کند. یک طرح ساده از اصل در شکل 10 نشان داده شده است. اشعه ایکس بر روی لایه اول (B) در زاویه براگ فرود می آید و دو پرتو پراش را ایجاد می کند. این دو پرتو بر روی تیغه دوم (M) برخورد می کنند. دو هوای دیگر از پرتوهای پراکنده تولید می شود و یک پرتو از هر جفت بر روی لایه سوم (A) برخورد می کند. هنگامی که لایه سوم (A) جابجا میشود، یک الگوی حاشیه Moiré ایجاد میشود که باعث ایجاد شدتی در آشکارساز میشود که به صورت سینوسی با جابجایی با دورهای از یک حاشیه پرتو ایکس (0.192 نانومتر) تغییر میکند. در واقع تداخل سنج از یک کریستال سیلیکون ساخته شده است و حرکت کاملاً مستقیم و موازی لایه سوم (A) با طراحی مرحله خمشی به دست می آید. توسط یک مرحله پیزو هدایت می شود و برد آن 10 میکرومتر است. این محدوده با ترکیب این تداخل سنج با تداخل سنج آینه ای صفحه، که در آن تداخل سنج اشعه ایکس برای تعیین کسر در یک جابجایی حاشیه ای تداخل سنج استفاده می شود، گسترش یافته است. علاوه بر این، از آن برای تأیید عملکرد تداخلسنجهای نوری اندازهگیری جابهجایی استفاده شده است، جایی که مجموعهای دقیق از اندازهگیریهای مقایسه بین تداخلسنج اشعه ایکس و تداخلسنج نوری دو کاناله Fabry-Pérot (DFPI) برای مترولوژی جابجایی پیکومتر و نشان دادن قابلیتهای هر دو ابزار ساخته شده است. نتایج نشاندهنده تطابق خوبی بین دو ابزار است، اگرچه تفاوتهای جزئی کمتر از 5 بعد از ظهر مشاهده شده است. یک تداخل سنج اشعه ایکس، همراه با تداخل سنج لیزری، برای کالیبراسیون LVDT توسط پارک استفاده شد.
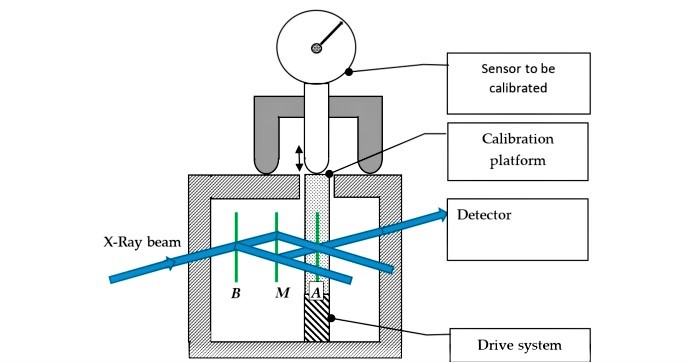
شکل10: طرح ساده شده یک سیستم تداخل سنج اشعه ایکس. لاملا به صورت B، M و A نشان داده شده است.
5 پلتفرم های کالیبراسیون پویا
در جایی که تمام سیستمهای مورد بحث در بخش 4 میتوانند یک کالیبراسیون سنسور استاتیکی انجام دهند و یک مشخصه کالیبراسیون را برای یک پروب مشابه شکل 2 تعیین کنند، بسیاری از پروبها فقط برای اندازهگیری یک جابجایی استفاده نمیشوند، بلکه برای اندازهگیری یک پروفیل یا حتی توپوگرافی استفاده میشوند. در چنین اندازهگیری، ویژگیهای کاوشگر پویا، و همچنین اندازه و هندسه پروب مرتبط میشوند. با توجه به ویژگیهای کاوشگر پویا، این ویژگیها را میتوان با استفاده از فناوریها و برخی از تنظیمات مورد بحث در فصل 4 تعیین کرد. به عنوان مثال، کالیبراسیون سنسور محور z یک میکروسکوپ نیروی اتمی مستقل (AFM)، در حالی که سطح صافی را که با جابجایی های کالیبره شده حرکت می داد اندازه گیری می کرد، توسط سه نویسنده نشان داده شد. به طور سنتی، سیستم های کالیبراسیون سنسور پویا، که گاهی اوقات به عنوان “جدول متحرک” نامیده می شود، در کالیبراسیون سنسور ابزارهای اندازه گیری زبری استفاده می شد. شکل 11 یک طرح کلی از چنین تنظیمی را نشان می دهد. یک سیگنال وابسته به زمان به یک ژنراتور جابجایی تغذیه می شود. این جابجایی توسط پروب/ابزار تحت کالیبراسیون سنسور اندازه گیری می شود. برای اهداف کالیبراسیون، این جابجایی می تواند به طور همزمان توسط یک سیستم مرجع اندازه گیری شود. در بیشتر موارد، شکل موج تولید شده تابعی از زمان است، جایی که ابزاری که باید کالیبره شود، مختصات z را به عنوان تابعی از موقعیت (x,y) اندازه گیری می کند. در صورت ثابت بودن سرعت پروب جانبی کافی، این مشکل قابل توجهی ایجاد نمی کند، با این حال یک ارتباط مستقیم با یک کنترل کننده AFM نیز ایجاد شده است. این تنظیم برای کالیبره کردن سنسور کاوشگرهای مستقل یا ابزارهای اندازه گیری توپوگرافی سطحی مانند تسترهای زبری و گردی مناسب ترین است.
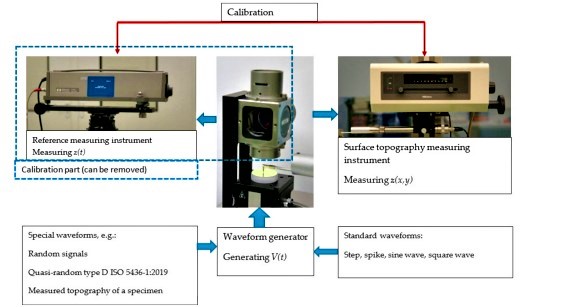
شکل 11: طرح تنظیم کالیبراسیون پروب پویا. قسمت کالیبراسیون (که با یک خط نقطه نشان داده می شود) را می توان پس از کالیبره شدن سیستم جدا کرد.
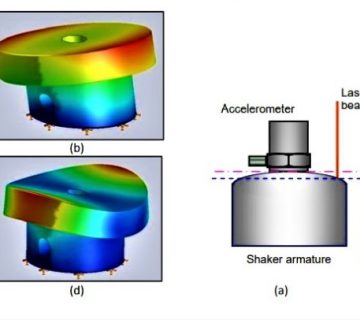
در جایی که سیستم نشان داده شده در شکل 11 دارای اندازه نسبتاً ماکروسکوپیک است و برای مثال کالیبراسیون AFM مناسب نیست، نسخه های کوچک شده برای کالیبراسیون عمودی و جانبی سنسور ها AFM توسعه داده شده است. یک سیستم قابل حمل با تداخل سنج لیزری مرجع یکپارچه توسط Pisani و همچنین توسط Liang توسعه یافته است. در کنار شبیهسازی استاندارد مرحله، کالیبراسیون بر اساس سیگنالهای سینوسی نسبتاً مناسب است، زیرا امکان مقایسه مستقیم با پارامتر سطح Rq یا Sq را فراهم میکند. همچنین امکان بررسی پهنای باند و کالیبراسیون عملکرد فیلتر مناسب ابزار را فراهم می کند. توپوگرافی سطح یک جسم واقعی را می توان اندازه گیری کرد که به عنوان یک اندازه گیری شبیه سازی شده با استفاده از تنظیم کالیبراسیون تکرار می شود. به این ترتیب کالیبراسیون به بررسی سیستمی نزدیک می شود که فراتر از کالیبراسیون جابجایی پروب است.
6 مباحثه
بسیاری از سیستمهای کالیبراسیون پروب توسعه داده شدهاند که پروبها و ابزارهای اندازهگیری جابجایی را قادر میسازند از محدوده عدم قطعیت میکرومتر تا pm کالیبره شوند. سیستم های کالیبراسیون می توانند قابلیت ردیابی و عدم قطعیت کافی را ارائه دهند. با این حال، این کاربرد هنوز عمدتاً در داخل موسسات تحقیقاتی و ملی اندازهشناسی است، جایی که قابلیت ردیابی را برای ابزارهای مرجعی که استانداردهای مرجع مواد را کالیبره میکنند (مانند استانداردهای ارتفاع پله) و کار با آنها آسانتر از سیستمهای کالیبراسیون پیچیده است فراهم میگردد. برخی از سیستمهای قابل حمل که کالیبراسیون دینامیکی را امکانپذیر میکنند طراحی شدهاند که برای کالیبره کردن حسگرها در میدان مورد استفاده قرار گیرند. در زمان مناسب، تداخلسنجهای لیزری تجاری موجود به عدم قطعیت نانومتر و زیر نانومتر دست یافتهاند و روشهای تشخیص یا اجتناب از غیرخطیها به حدی توسعه یافتهاند که ممکن است مفید بودن حفرههای Fabry-Pérot مورد شک قرار گیرد. از سوی دیگر، توسعه شانه فرکانس و فناوریهای تشخیص فرکانس بالا مرتبط، فناوریهای مبتنی بر Fabry-Pérot را قادر به دستیابی به عدم قطعیتهای محدوده pm کرده است.
(Haitjema 2020)
Haitjema, H. (2020). “The calibration of displacement sensors.” Sensors 20(3): 584.
Sensors | Free Full-Text | The Calibration of Displacement Sensors (mdpi.com)
Pisani, M.; Giugni, A. A portable picometer reference actuator with 100 µm range, picometer resolution, subnanometer accuracy and submicroradian tip-tilt error for the characterization of measuring instruments at the nanoscale. Metrologia 2018, 55, 541–557. [CrossRef]
Kuetgens, U.; Andreas, B.; Friedrich, K.; Weichert, C.; Kochert, P.; Flugge, J. Measurement of the Silicon Lattice Parameter by Scanning Single Photon X-Ray Interferometry. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements (CPEM 2018), Paris, France, 8–13 July 2018.

{kind=link}
بدون دیدگاه