



سوال غالب در این باره این است که آیا با استفاده از خروجی شتابسنج میتوان سرعت و جابجایی را محاسبه کرد. به طور خلاصه میتوان گفت که : ” بله و نه”. این کار به میزان دقت مورد نظر بستگی دارد. به طور کلی استفاده از شتاب سنج های ارزان ( چند صد هزار تومان به جای چند ده میلیون تومانی ) برای محاسبه سرعت و جابجایی باعث بدست آمدن نتایج بسیار ضعیف و غیر قابل استفاده میشود. این اتفاق به علت ضعیف بودن شتابسنج ها نمیباشد ، بلکه بخاطر این است که جهت گردش سنسور باید با دقت زیادی قابل خواندن باشد تا مشخصه های گرانشی از شتاب فیزیکی خود سنسور قابل تشخیص باشد.
حتی کوچکترین خطا ها در اندازه گیری جهت و چرخش باعث ایجاد خطاهای بزرگ در مقدار شتاب و حتی خطاهایی بزرگتر درمحاسبه سرعت و جابجایی میشود.
هرچند برخی دستگاه ها نیاز به دقت بسیاری ندارند ، و بعضی از اوقات دقت بالا به اندازه توانایی اندازه گیری در بازه های کوچک سرعت و جابجایی نیاز نیست.
در این مقاله به چیزهایی که برای اندازه گیری سرعت و جابجایی از طریق استفاده از شتابسنج نیاز داریم میپردازیم. همچنین میزان دقتی که قابل پیشبینی است در این روش از اندازه گیری را مشخص مینماییم.
برای بدست آوردن نقطه دید مناسب برای سرعت و جابجایی، ضروریست شتاب فیزیکی سنسور در حالت بیننده بدست آوریم. برای اینکه شتاب اندازه گیری شده توسط سنسور را به شتاب واقعی فیزیکی سنسور تبدیل کنیم باید اول بدانیم که سنسور شتابسنج دقیقا چه چیزی را محاسبه میکند.
به طور خلاصه سنسور هم شتاب حرکت خود سنسور را محاسبه میکند هم مجموع نیروهایی که جلوی حرکت سنسور را به سمت هسته زمین میگیرند. برای بدست آوردن میزان شتاب سنسور باید نیروهای دیگر را حذف کنیم.از این فرمول شتاب را بدست می آوریم.
که در آن a B شتاب بدنه اصلی میباشدg شتاب گرانش، R ماتریس چرخش از فریم اصلی تا فریم ثابت میباشد. این مدل با فرض عدم وجود محور درجه دار تشکیل شده با حل کردن شتاب حرکت بدنه بدست می آید.
شتاب حرکت بدنه باید به شکل اینرسی بیننده تبدیل شود.
از این فرمول میتوان برای بدست آوردن فریم اینرسی استفاده نمود که g میتواند شتاب گرانش باشد یا شتاب دلخواه.
تخمین سرعت و جابجایی:
زمانی که شتاب بدنه ثابت بدست آمد میتوان با گرفتن مشتق آن سرعت مورد نظر و جابجایی را بدست آوریم.
در عمل اطلاعات در بازه های زمانی گسسته بدست میآیند پس سرعت و جابجایی تخمین زده شده با استفاده از اینها بدست آمده اند ، که در اینجا T دوره زمانی آزمایشی است .
این دوره آزمایشی بدست آمده نه اینکه به سخت افزار مورد استفاده برای انتقال اطلاعات از سنسور بستگی نداشته باشد زیرا که اگر از آن اطلاعات استفاده کنیم ممکن است عدد های دقیق بدست نیاید بلکه باید از میزان آزمایشی های تخمین زده شده استفاده کرد. در صورت استفاده از کامپیوتر ها و ویندوز ها دیرکرد های غیر قابل پیشبینی را به بار خواهد آورد در زمان رسیدن اطلاعات سری ،که باعث ایجاد نا هماهنگی ها و عدم دقت در زمان میشود.


دقت تخمین سرعت و جابجایی:
باید دقت شود که در بخش قبلی از چرخش ماتریس استفاده میکنیم برای تغییر فریم بدنه اندازه گیری شده به مقدار اینرسی که با مقدار اضافی شتاب گرانش در فریم اینرسی محاسبه میشود.
از آنجایی که در عمل میزان گردش دقیق سنسور را نمیدانیم، شتاب گرانش اضافه شده نمیتواند به خوبی نیرو های اضافه را حذف کند و این نیرو ها ممکن است به جای شتاب اشتباه گرفته شوند. به نظر می رسد که سنسور های ارزان قیمت و ضعیف به دلیل مشکل درخواندن دقیق گردش سنسور باعث ایجاد خطا در اندازهگیری شتاب میشود که از مقدار خطا های تطبیق سنسور و ارسال اطلاعات بسیار بیشتر میشود. این خطا ها در صورت ضرب و تقسیم شدن بسیار زیاد میشوند به طوری که تخمین سرعت و جابجایی را بی فایده و غیر قابل استفاده میکنند.
این جدول به طور خلاصه خطاهای سرعت و جابجایی و شتاب را نشان میدهد.چ
 روشهای محاسباتی معمولی که برای بدست آوردن سرعت و جابجایی با استفاده از سنسور شتاب سنج بکار میروند در صورتی که از شتاب سنج با دقت بالا استفاده شود بدینگونه است:
روشهای محاسباتی معمولی که برای بدست آوردن سرعت و جابجایی با استفاده از سنسور شتاب سنج بکار میروند در صورتی که از شتاب سنج با دقت بالا استفاده شود بدینگونه است:
بهترین روش ریاضیاتی که در این موارد استفاده میشود دو بار انتگرال گیری میباشد.
شتاب همان نرخ تغییر سرعت در یک جسم میباشد. در عین حال سرعت هم نرخ تغییر مکان همان جسم میباشد. به بیان دیگر سرعت، مشتق مکان میباشد و شتاب مشتق سرعت:

انتگرال بر عکس مشتق میباشد پس اگر شتاب یک جسم را داشته باشیم ، با استفاده از دو بار انتگرال گرفتن میتوانیم مکان جسم را به دست آوریم.
یکی از راه های متوجه شدن این موضوع این است که انتگرال را محیط زیر منحنی تعریف کنیم، که در آن مجموع محیط های بسیار کوچک با عرض تقریبا صفر را محاسبه میکنیم. به بیان دیگر مجموع چند انتگرال یک متغیر فیزیکی را به وجود میآورد.
با نتیجه گیری از آنچه گفته شد درباره سطح زیر نمودار میتوان گفت:
نمونه برداری از یک سیگنال به ما مقدارهای لحظه ای از اندازه آن سیگنال میدهد ، پس میتوانیم فاصلههای کوچکی بین هر نمونه برداری ایجاد کنیم. برای اینکه نمونه نهایی یک مقدار منسجم باشد باید فواصل زمانی نمونه برداری با هم برابر باشند. زمان نمونه برداری نشانگر قاعده و مقدار اندازه گیری و نمونه برداری شده نمایانگر ارتفاع میباشد. برای اینکه از اعشار استفاده نکنیم (میکرو ثانیه یا میلی ثانیه ) زمان را یک واحد در نظر میگیریم.
حال که میدانیم هر نمونه نمایانگر محیطی به قاعده یک می باشد ؛ میتوان نتیجه گرفت اندازه انتگرال برابر با مجموع این نمونهها می باشد.
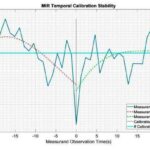
در زمان واقعی خطا به صورت شکل بالا وجود دارد . این خطا به رخ دادن ادامه میدهد تا زمانی که به کار ادامه میدهیم. از این خطا ها با عنوان خطا های نمونه گیری یاد میشود . برای کم کردن این مقدار از یک تخمین ساده استفاده میشود . در این روش این بخش ها به عنوان مجموع چند بخش کوچکتر در نظر گرفته میشوند.
فرمولی که برای از بین بردن خطا استفاده میکنیم به گونه زیر میباشد.

{kind=link}
بدون دیدگاه